目录
2.3、startupProbe启动探针(1.17版本新增)
一、健康检测
1、健康检查的定义
健康检查又称为探针(Probe),是由kubelet对容器执行的定期诊断。
2、探针规则
2.1、livenessProbe存活探针
判断容器是否正在运行。如果探测失败,则kubelet会杀死容器,并且容器将根据restartPolicy来设置Pod状态,如果容器不提供存活探针,则默认状态为Success。
2.2、readinessProbe就绪探针
判断容器是否准备好接受请求。如果探测失败,端点控制器将从与Pod匹配的所有service endpoints中剔除删除该Pod的IP地址。初始延迟之前的就绪状态默认为Failure。如果容器不提供就绪探针,则默认状态为Success。
2.3、startupProbe启动探针(1.17版本新增)
判断容器内的应用程序是否已启动,主要针对于不能确定具体启动时间的应用。如果匹配了startupProbe探测,则在startupProbe状态为Success之前,其他所有探针都处于无效状态,直到它成功后其他探针才起作用。如果startupProbe失败,kubelet将杀死容器,容器将根据restartPolicy来重启。如果容器没有配置startupProbe,则默认状态为Success。
注:以上规则可以同时定义。在readinessProbe检测成功之前,Pod的running状态是不会变成ready状态。
startupProbe、livenessProbe、ReadinessProbe之间的区别:
startupProbe: pod只检测一次,剩下的两种只要你的pod存在就会一直去检测
livenessProbe、ReadinessProbe:建议使用接口级的健康检查2.4、Probe支持的三种检查方法
Exec:在容器内执行一个命令,如果返回值为0,则认为容器健康。
TCPSocket:通过TCP连接检查容器内的端口是否是通的,如果是通的就认为容器健康。
HTTPGet:通过应用程序暴露的API地址来检查程序是否是正常的,如果状态码为200~400之间,则认为容器健康。
2.5、探测获得的三种结果
每次探测,都将会获得以下三种结果之一:
- 成功: 容器通过了诊断
- 失败: 容器未通过诊断
- 未知:诊断失败,因此不会采取任何行动
3、exec
vim exec.yaml
apiVersion: v1
kind: Pod
metadata:
labels:
test: liveness #为了健康检查定义的标签
name: liveness-exec
spec: #定义了Pod中containers的属性
containers:
- name: liveness
image: busybox
args: #传入的命令
- /bin/sh
- -c
- touch /tmp/healthy; sleep 30; rm -rf /tmp/healthy;sleep 600
livenessProbe:
exec:
command:
- cat
- /tmp/healthy
initialDelaySeconds: 5 #表示pod中容器启动成功后,多少秒后进行健康检查
periodSeconds: 5 #在首次健康检查后,下一次健康检查的间隔时间 5s
在这个配置文件中,可以看到 Pod 中只有一个容器。
探针可选的参数
- initialDelaySeconds∶指定 kubelet 在执行第一次探测前应该等待5秒,即第一次探测是在容器启动后的第6秒才开始执行。默认是 0 秒,最小值是 0。
- periodSeconds∶指定了 kubelet 应该每 5 秒执行一次存活探测。默认是 10 秒。最小值是 1。
-== failureThreshold==∶当探测失败时,Kubernetes 将在放弃之前重试的次数。存活探测情况下的放弃就意味着重新启动容器。就绪探测情况下的放弃 Pod 会被打上未就绪的标签。默认值是 3。最小值是 1。 - timeoutSeconds∶探测超时后等待多少秒。默认值是 1 秒。最小值是 1。(在 Kubernetes 1.20 版本之前,exec 探针会忽略timeoutSeconds 探针会无限期地持续运行,甚至可能超过所配置的限期,直到返回结果为止。)
periodSeconds 字段指定了 kubelet 应该每 5 秒执行一次存活探测。
initialDelaySeconds 字段告诉 kubelet 在执行第一次探测前应该等待 5 秒。
kubelet 在容器内执行命令 cat /tmp/healthy 来进行探测。 如果命令执行成功并且返回值为 0,kubelet 就会认为这个容器是健康存活的。 如果这个命令返回非 0 值,kubelet 会杀死这个容器并重新启动它。
apiVersion: v1
kind: Pod
metadata:
labels:
test: liveness
name: liveness-exec
spec:
containers:
- name: liveness
image: busybox
args:
- /bin/sh
- -c
- touch /tmp/healthy; sleep 30; rm -rf /tmp/healthy;sleep 60
livenessProbe:
exec:
command:
- cat
- /tmp/healthy
initialDelaySeconds: 5
periodSeconds: 5

#创建pod
kubectl create -f exec.yaml
#跟踪查看pod 信息
kubectl get pod -o wide -w
#查看pod 的消息信息
kubectl describe pod liveness-exec


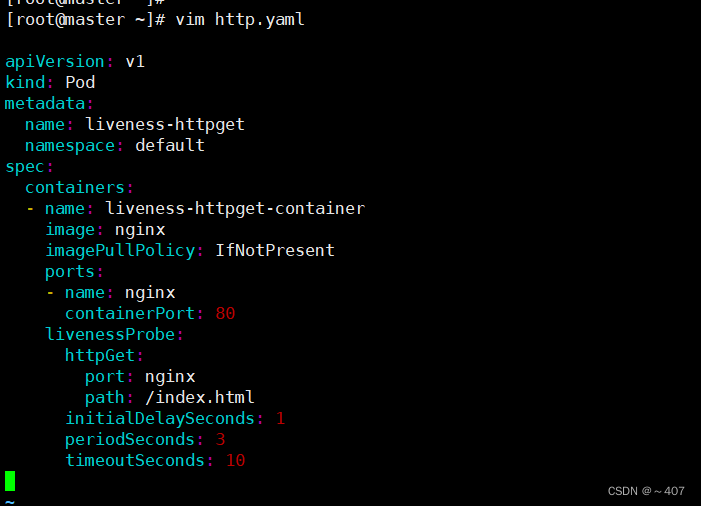
4、 httpget
apiVersion: v1
kind: Pod
metadata:
name: liveness-httpget
namespace: default
spec:
containers:
- name: liveness-httpget-container
image: nginx
imagePullPolicy: IfNotPresent
ports:
- name: nginx
containerPort: 80
livenessProbe:
httpGet:
port: nginx
path: /index.html
initialDelaySeconds: 1
periodSeconds: 3
timeoutSeconds: 10
在配置文件中,可以看到Pod具有单个Container。
该periodSeconds字段指定kubectl应该每3秒执行一次活动性探测。
该initiaDelaySeconds字段告诉kubelet在执行第一个探测之前应等待3秒。
为了执行探测,kubectl将HTTP GET请求发送到Container中运行并在端口8080上侦听的服务器。如果服务器/healthz路径的处理程序返回成功代码,则kubectl会认为任何大于或等于400的代码均表示成功,其他代码都表示失败。
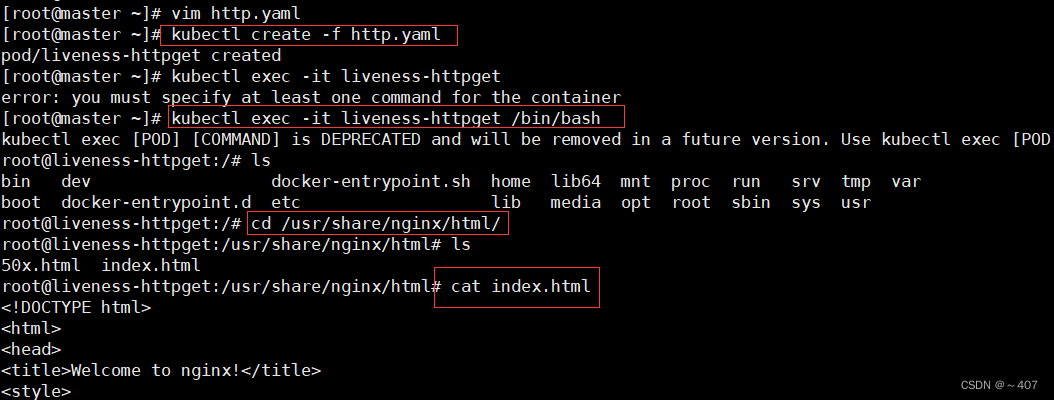
#加载yaml文件
kubectl create -f http.yaml
#查看pod的详细参数
kubectl get pod -o wide -w
kubectl describe pod liveness-http


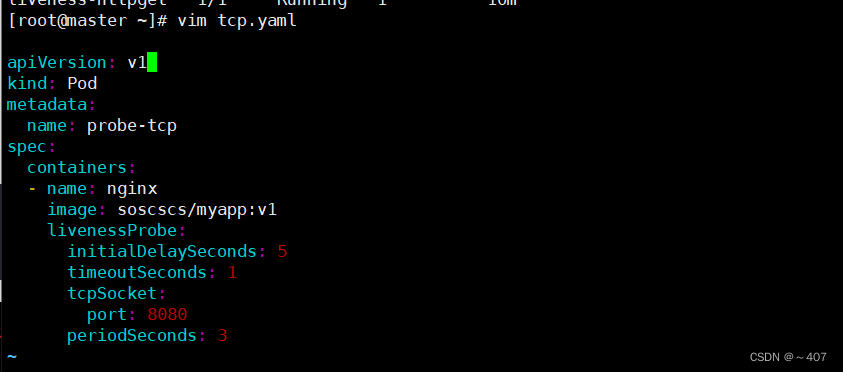
5、tcpsocket
定义TCP活动度探针
第三种类型的活动性探针使用TCP套接字,使用此配置,kubelet将尝试在指定端口上打开容器的套接字。
如果可以建立连接,则认为该让其运行状况良好,如果不能,则认为该容器是故障容器。
apiVersion: v1
kind: Pod
metadata:
name: probe-tcp
spec:
containers:
- name: nginx
image: soscscs/myapp:v1
livenessProbe:
initialDelaySeconds: 5
timeoutSeconds: 1
tcpSocket:
port: 8080
periodSeconds: 3
TCP 检测的配置和 HTTP 检测非常相似。 下面这个例子同时使用就绪(readinessProbe)和存活(livenessProbe)探测器。
kubelet 会在容器启动 5 秒后发送第一个就绪探测。 这会尝试连接 goproxy 容器的 8080 端口。 如果探测成功,这个 Pod 会被标记为就绪状态,kubelet 将继续每隔 10 秒运行一次检测。
除了就绪探测,这个配置包括了一个存活探测。 kubelet 会在容器启动 15 秒后进行第一次存活探测。 与就绪探测类似,会尝试连接 goproxy 容器的 8080 端口。 如果存活探测失败,这个容器会被重新启动
编写yaml文件
kubectl create -f tcpsocket.yaml
#查看容器里的端口(查看有无8080端口)
kubectl exec -it probe-tcp -- netstat -natp
#查看pod的状态和详细信息
[root@master ~]# kubectl get pods
[root@master ~]# kubectl describe pod probe-tcp

如图所示,TCP检查的配置与HTTP检查非常相似,此示例同时使用就绪和活跃度探针,容器启动5秒后,kubelet将发送第一个就绪探测器。这些尝试连接到goproxy端口8080上的容器。如果探测成功,则容器将标记为就绪,kubelet将继续每10秒运行一次检查。
除了就绪探针之外,此配置还包括活动探针。容器启动后15秒钟,kubelet将运行第一个活动谈着,就像就绪探针一样,这些尝试goproxy在端口8080上连接到容器。如果活动探针失败,则容器将重新启动。
二、总结
探针(3 种)
livenessProbe(存活探针)∶判断容器是否正常运行,如果失败则杀掉容器(不是pod),再根据重启策略是否重启容器
readinessProbe(就绪探针)∶判断容器是否能够进入ready状态,探针失败则进入noready状态,并从service的endpoints中剔除此容器
startupProbe∶判断容器内的应用是否启动成功,在success状态前,其它探针都处于无效状态
检查方式(3种)
exec∶使用 command 字段设置命令,在容器中执行此命令,如果命令返回状态码为0,则认为探测成功
httpget∶通过访问指定端口和url路径执行http get访问。如果返回的http状态码为大于等于200且小于400则认为成功
tcpsocket∶通过tcp连接pod(IP)和指定端口,如果端口无误且tcp连接成功,则认为探测成功
探针可选的参数
initialDelaySeconds∶ 容器启动多少秒后开始执行探测
periodSeconds∶探测的周期频率,每多少秒执行一次探测
failureThreshold∶探测失败后,允许再试几次
timeoutSeconds ∶ 探测等待超时的时间
原文链接:https://blog.csdn.net/weixin_56270746/article/details/126146764

此处评论已关闭